🤝 Top Collaborators

.png&w=640&q=75)
🤓 Latest Submissions
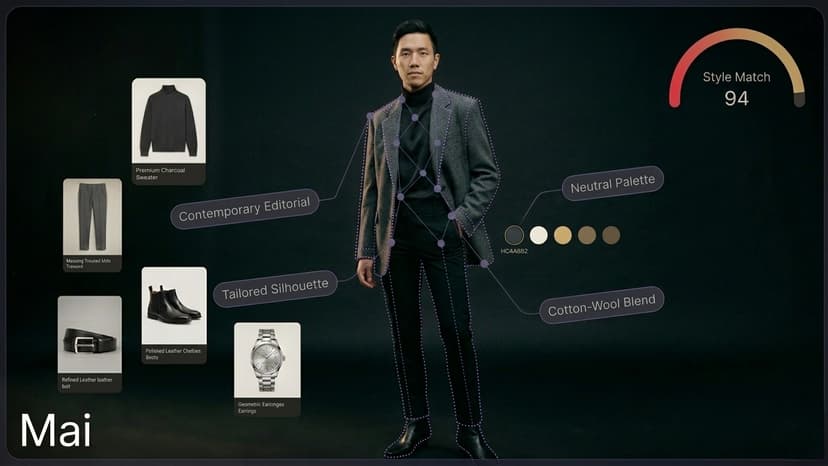
Mai - Agentic commerce for Fashion
Have you bought an outfit that looked great in-store but fell flat at the event? Have you scrolled through page after page of product grids, overwhelmed by options and filters that don't actually understand what you're looking for? Online shopping hasn't fundamentally changed in twenty years. Since the early 2000s, the experience has been the same one-sided transaction: browse a grid, filter by size, add to cart, checkout. You still can't bring your closet. Mai is that shift — from e-commerce to a-commerce. You bring your wardrobe, body, and style into the conversation. This makes online more powerful than in-store — you can't carry your closet to a physical shop, but with Mai you can. Visualize how new pieces work with what you already own. How it works: Upload a portrait. Your AI stylist builds your Style DNA: silhouettes, palettes, style eras & fabrics. Every product is scored across five categories against your profile. Only what genuinely fits you is shown, with transparent reasoning. Try before you buy: Generate try-on images and outfit videos via Veo — in any environment you choose. Pin a location (a restaurant, office, or wedding venue) on Maps and Mai pulls real imagery of that place, then shows you wearing the outfit there. Outfits, not items: Your cart is analyzed as a complete outfit across six categories. The agent proactively detects gaps ("jacket and pants but no shoes") and finds what completes it. Built on a multi-agent architecture with open protocols (A2A, UCP): a client agent represents you, a merchant agent the seller. Payments (via AP2): human-present checkout with cryptographic challenge-response, and human-not-present mandates that let the agent autonomously purchase Wishlist items within spending limits you set. Mai is hyper-personalization for fashion. Shifting fashion retail from CRM to CAM — Customer Aura Management: understanding how you feel about what you wear, what makes you confident, and what would actually work for your life.
19 May 2026
Adaptifleet
Traditional warehouse automation has improved efficiency, yet many systems remain rigid, expensive, and difficult to adapt when workflows or layouts change. Even small adjustments often require specialized expertise or time-consuming reprogramming. This creates a disconnect between what operators need robots to do and how easily they can communicate those needs — a challenge we call the “Human Intent Gap.” AdaptiFleet was designed to close this gap by enabling intuitive, AI-driven fleet control. Instead of relying on complex interfaces or predefined scripts, users interact with autonomous robots using natural language. Commands such as “Get me three bags of chips and a cold drink” are interpreted and translated into structured robotic tasks automatically. At its core, AdaptiFleet leverages Gemini-powered Vision Language Models (VLMs) to understand user intent and visual context. Robots operate within a dynamic decision framework, allowing them to adapt to changing environments rather than follow rigid, pre-programmed routes. The platform integrates a digital twin simulation stack built on Isaac Sim, enabling teams to validate behaviors, test workflows, and optimize multi-robot coordination before live deployment. Once deployed, ROS2 and Nav2 provide robust navigation, dynamic path planning, and collision avoidance. The VLM orchestration layer continuously analyzes visual inputs to support scene understanding, anomaly detection, and proactive hazard awareness. When conditions change, AdaptiFleet autonomously re-plans routes and tasks, reducing downtime and operational disruption. By combining conversational interaction, real autonomy, and simulation-driven validation, AdaptiFleet simplifies robotic deployments while improving efficiency and visibility. The result is an automation system that is adaptive, scalable, and aligned with how people naturally work.
15 Feb 2026



