Top Builders
Explore the top contributors showcasing the highest number of app submissions within our community.
YOLO
YOLO (You Only Look Once) is a state-of-the-art, real-time object detection algorithm that can quickly detect and locate objects within an image or video. The YOLO architecture works by taking an input and separating it into a grid of cells and each of these cells is in charge of detecting objects within that region. YOLO returns the bounding boxes containing all the objects in the image and predicts the probability of an object being in each of the boxes and also predicts a class probability to help identify the type of object it is. YOLO is a highly effective object detection algorithm and making YOLO and open-source project led the community to make several improvements in such a limited time.
| General | |
|---|---|
| Relese date | 2015 |
| Author | Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali Farhadi |
| Paper | (https://arxiv.org/abs/1506.02640) |
| Type | Object detection algorithm |
YOLO - Resources
Learn even more about YOLO!
- v7 Labs Blog "YOLO: Algorithm for Object Detection Explained".
- YOLOv5 Repository Object detection architectures and models pretrained on the COCO dataset.
- YOLOv6 Web demo Gradio demo for YOLOv6 for object detection on videos.
- Hugging Face Spaces Test YOLOv7 in the browser with Hugging Face Spaces.
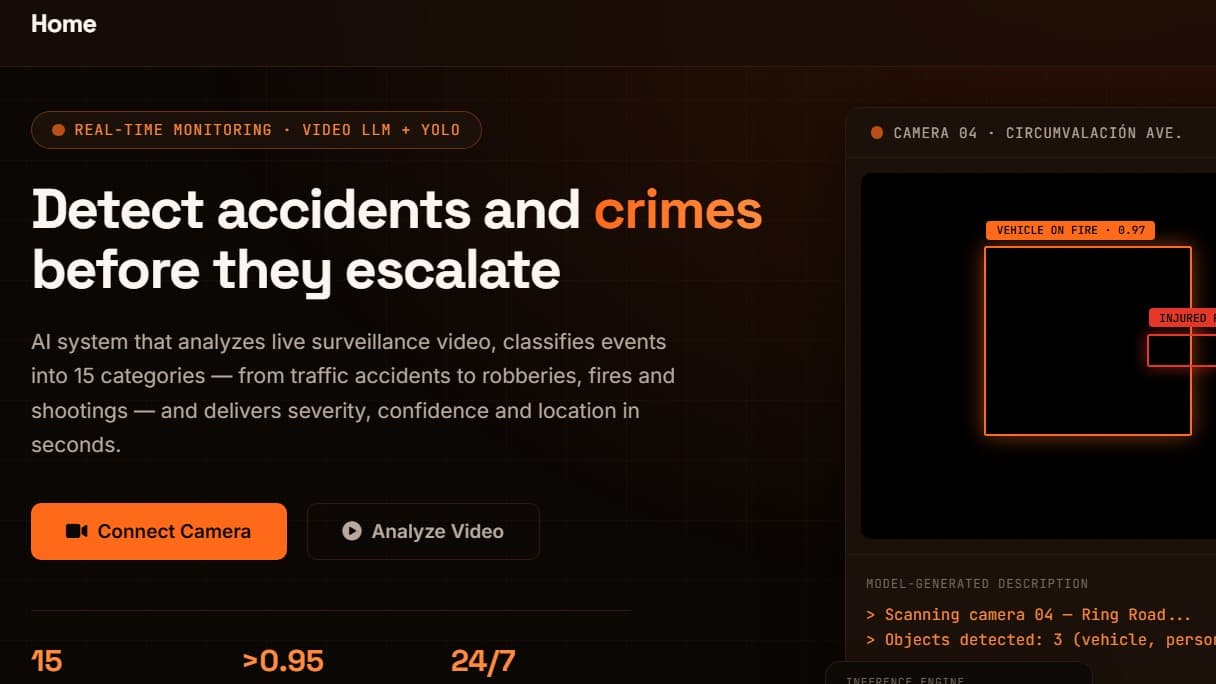
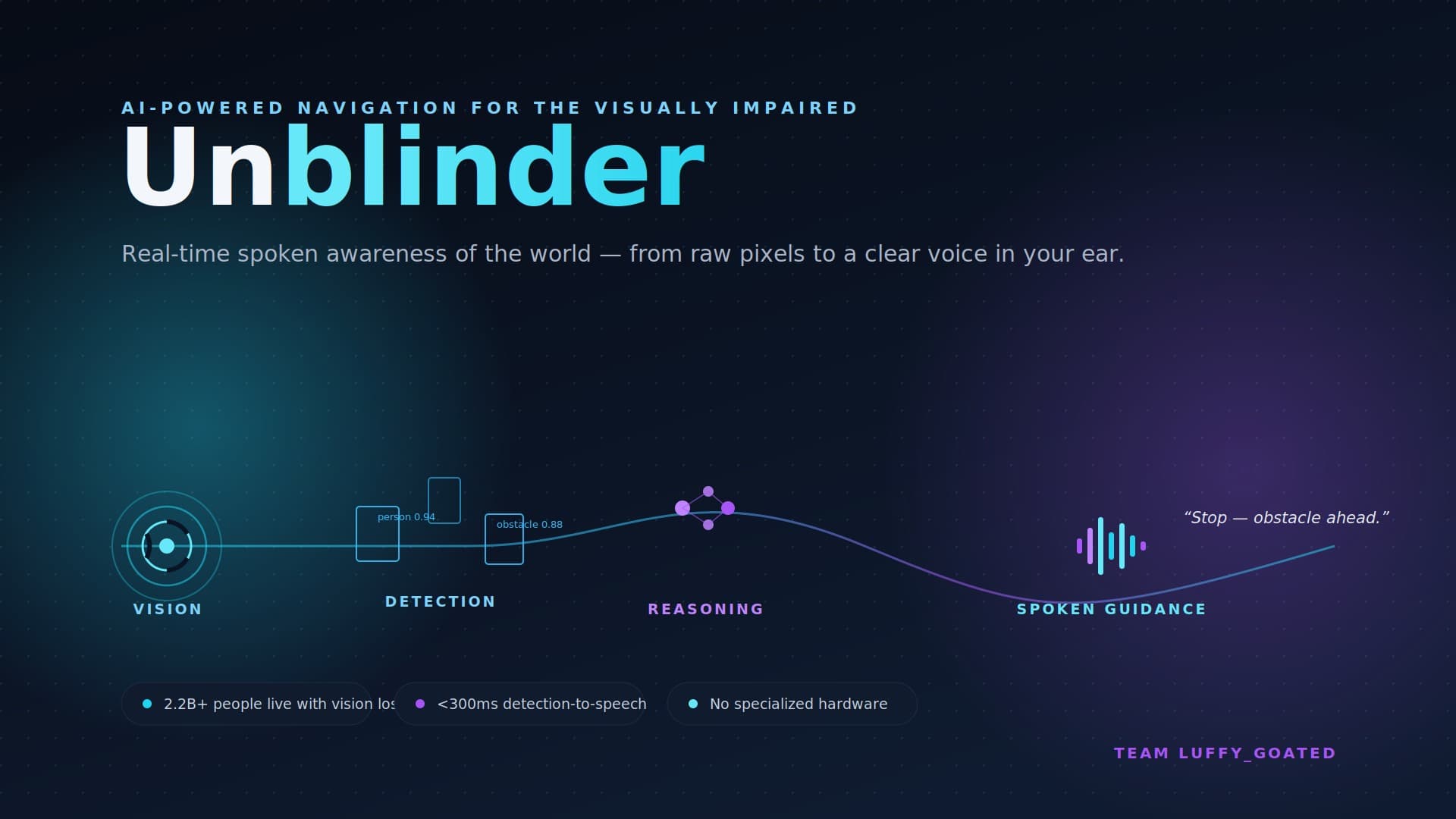
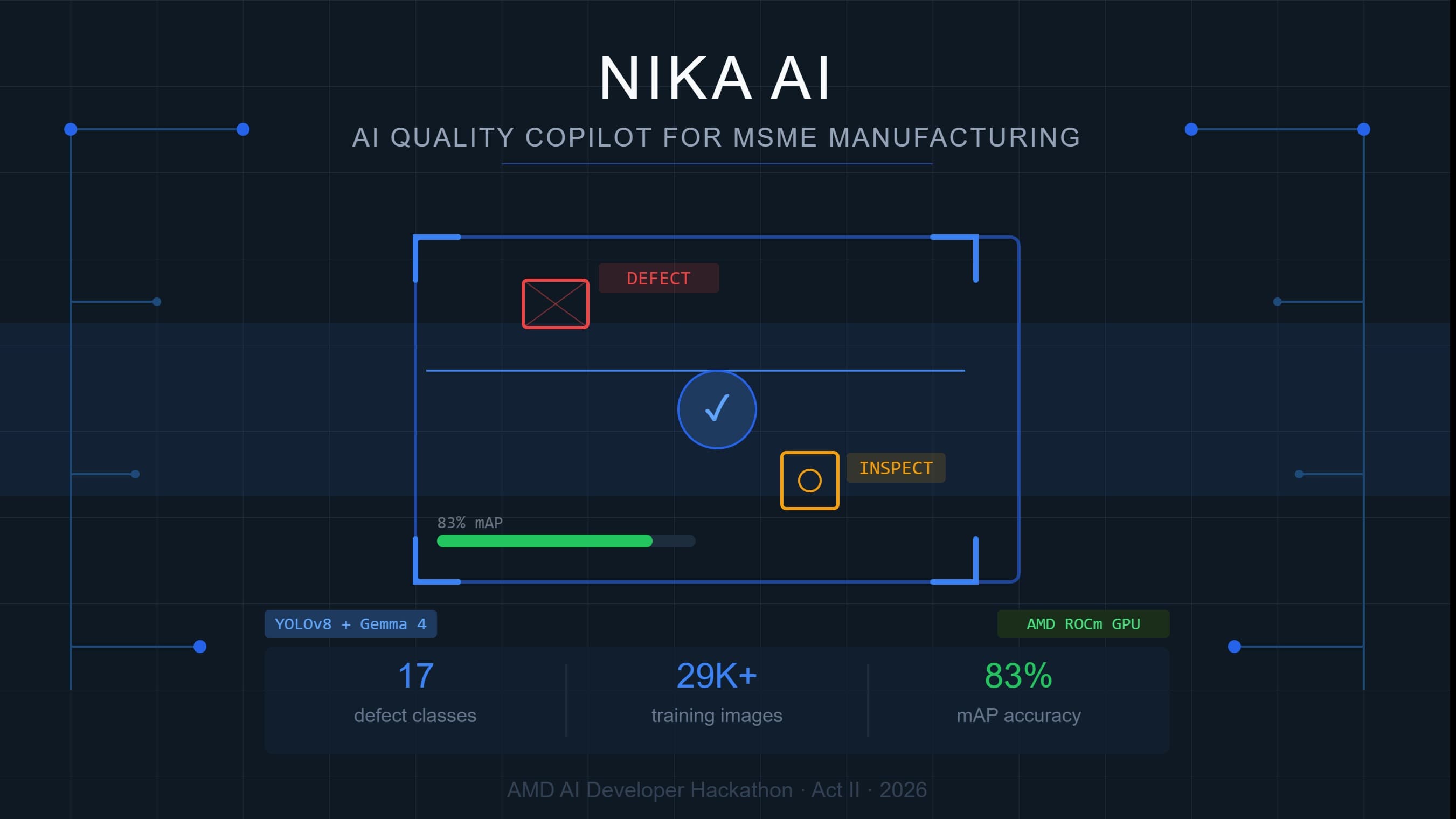
YOLO AI Technologies Hackathon projects
Discover innovative solutions crafted with YOLO AI Technologies, developed by our community members during our engaging hackathons.