🤝 Top Collaborators
🤓 Latest Submissions
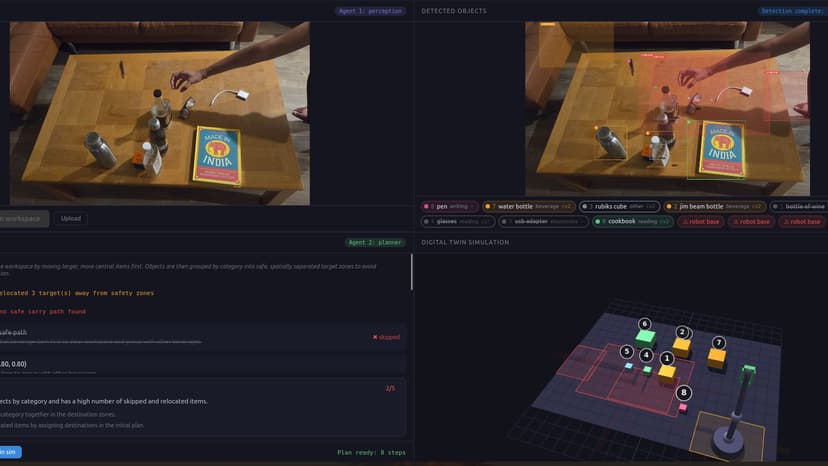
SafeArc: Adaptive Human-Safe Robot Sorting
Robots in shared workspaces are either fully stopped when humans are nearby, or dangerously unaware of them. SafeArc closes that gap. SafeArc is an adaptive spatial-sorting and safety engine built for real-world human-robot collaboration. It takes a single workspace photo/video and runs a two-agent Gemini pipeline: the first agent combines Gemini Vision with OpenCV contour snapping to detect every object with pixel-level precision, while simultaneously identifying human presence zones via skin-tone analysis and generating protective safety polygons around them. The second agent generates an optimal pick-and-place sequence, grouped by object category, then enforces hard geometric constraints — no destination may land inside a human zone, and no carry path may cross one, verified through ray-casting and 2D segment intersection. Steps with no safe route are explicitly skipped rather than risking a collision. SafeArc also self-improves: every session is rated by the user, and those ratings are injected as few-shot examples into future planning prompts. A built-in Evaluator Agent critiques each plan before the user even sees it, predicting a quality score and surfacing improvement suggestions. The entire experience — detection, planning, AI review, and a step-by-step 3D robot arm simulation — runs in a browser with no build step and no physical hardware required.
19 May 2026
